- РЕАКЦИИ СВЯЗЕЙ
-
для связей, осуществляемых с помощью к.-н. тел (см. СВЯЗИ МЕХАНИЧЕСКИЕ),— силы воздействия этих тел на точки механич. системы. В отличие от активных сил, Р. с. явл. величинами заранее неизвестными; они зависят не только от вида связей, но и от действующих на систему активных сил, а при движении — ещё и от закона движения системы и определяются в результате решения соответствующих задач механики.Направления Р. с. в нек-рых случаях определяются видом связей. Так, если в силу наложенных связей точка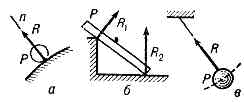 Рис. 1. Примеры связей R, наложенных на тело Р: а — гладкая поверхность; б — гладкая опора; в — нерастяжимая гибкая нить.
Рис. 1. Примеры связей R, наложенных на тело Р: а — гладкая поверхность; б — гладкая опора; в — нерастяжимая гибкая нить.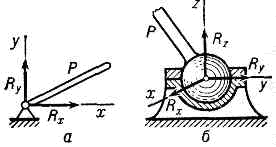 Рис. 2. Примеры реакции связи: а — с двумя, б — с тремя неизвестными составляющими.системы вынуждена всё время оставаться на заданной гладкой (лишённой трения) поверхности, то Р. с. R направлена по нормали n к этой поверхности (рис. 1). На рис. 2 показаны: а -гладкий цилиндрич. шарнир (подшипник), для к-рого неизвестны две (Rx и Ry), и б — гладкий сферич. шарнир, 'для к-рого неизвестны все три (Rx, Ry, Rz) составляющие P. c. Для шероховатой поверхности Р. с. имеет две составляющие: нормальную и касательную, называемую силой трения.В общем случае при решении задач динамики пользуются принципом освобождаемости, т. е. несвободную механич, систему рассматривают как свободную, прилагая к её точкам нек-рые силы, подобранные так, чтобы во всё время движения системы выполнялись условия, налагаемые на неё связями; эти силы и наз. Р. с.
Рис. 2. Примеры реакции связи: а — с двумя, б — с тремя неизвестными составляющими.системы вынуждена всё время оставаться на заданной гладкой (лишённой трения) поверхности, то Р. с. R направлена по нормали n к этой поверхности (рис. 1). На рис. 2 показаны: а -гладкий цилиндрич. шарнир (подшипник), для к-рого неизвестны две (Rx и Ry), и б — гладкий сферич. шарнир, 'для к-рого неизвестны все три (Rx, Ry, Rz) составляющие P. c. Для шероховатой поверхности Р. с. имеет две составляющие: нормальную и касательную, называемую силой трения.В общем случае при решении задач динамики пользуются принципом освобождаемости, т. е. несвободную механич, систему рассматривают как свободную, прилагая к её точкам нек-рые силы, подобранные так, чтобы во всё время движения системы выполнялись условия, налагаемые на неё связями; эти силы и наз. Р. с.
Физический энциклопедический словарь. — М.: Советская энциклопедия. Главный редактор А. М. Прохоров. 1983.
- РЕАКЦИИ СВЯЗЕЙ
-
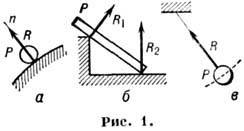
- для связей, реализуемых с помощью к.-н. тел (см. Связи механические),- силы, с к-рыми эти связи действуют на тела механич. системы, препятствуя тем или иным их перемещениям в пространстве. В отличие от активных сил, Р. с. являются величинами заранее неизвестными; они зависят от вида связей, от значений действующих на систему активных сил, а при движении системы ещё и от закона её движения и определяются в результате решения соответствующих задач механики. Направление Р. с. может в нек-рых случаях зависеть не от действующих активных сил, а только от вида связи. Напр., если для тела P связью является гладкая (лишён-ная трения) поверхность, то Р. с. направлена по нормали n к этой поверхности. На рис. 1 показано, как направлены Р. с. в случаях, когда связями являются гладкая поверхность ( а), гладкая опора ( б), гибкая нить ( в). В других случаях направление Р. с. заранее неизвестно.
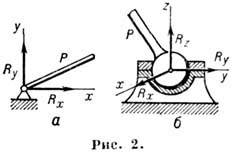
На рис. 2 показаны гладкий цилиндрич. шарнир (подшипник, а) и гладкий сферич. шарнир ( б), для к-рых Р. с. представлены соответственно двумя (Rx, Ry )и тремя ((Rx, Ry,Rz )составляющими.
Для шероховатой связи Р. с. имеет две составляющие: нормальную и касательную, наз. силой трения. При решении задач Р. с. определяются из ур-ний равновесия или движения рассматриваемой механич. системы. В задачах динамики в общем случае, когда о направлениях Р. с. заранее ничего неизвестно, механич. систему рассматривают как свободную, а к её телам прилагают нек-рые силы, подбираемые так, чтобы во всё время движения выполнялись условия, налагаемые на систему связями; эти силы и наз. Р. с.
С. M. Тарг.
Физическая энциклопедия. В 5-ти томах. — М.: Советская энциклопедия. Главный редактор А. М. Прохоров. 1988.
.