- РАДИОЛОКАЦИЯ
-
- обнаружение и определение местоположения разл. объектов с помощью радиотехн. устройств. Первые радиолокац. станции (РЛС), называемые также радиолокаторами или радарами, появились в Великобритании, СССР и США в кон. 1930-х гг.
Принцип действия систем радиолокации состоит в обнаружении и регистрации вторичных радиоволн, отражённых (рассеянных) наблюдаемыми объектами (см. Отражение радиоволн, Рассеяние радиоволн )при облучении их эл.-магн. волнами радиолокац. передатчика. Приём вторичных радиоволн направленной антенной позволяет определять угл. положение объектов относительно радиолокатора, а измерение времени запаздывания отражённых сигналов по отношению к сигналам передатчика - удаление объектов от радиолокатора. Ур-ние Р. для мощности Р Т принятого сигнала

где Pt- излучаемая мощность, Gt - усиление антенны на передачу, s - эфф. площадь рассеяния (ЭПР) объекта, А r- эфф. площадь поглощения приёмной антенны, R - дальность объекта Р.
Основные методы радиолокации. Наибольшее распространение получила активная импульсная Р. Вследствие того, что излучение зондирующего импульса заканчивается раньше прихода отражённого сигнала, для передачи и приёма в импульсных РЛС служит одна и та же антенна. Укрупнённая блок-схема РЛС изображена на рис. 1. Широкое применение в передающих устройствах РЛС нашли магнетроны, однако в большинстве современных РЛС передатчик построен по схеме усилителя электрических колебаний (с выходным каскадом на клистроне или лампе бегущей волны )и имеет задающий ВЧ-генератор, служащий также источником гетеродинного напряжения приёмника (см. также Радиоприёмные устройства), а процессор сигнала представляет собой цифровое устройство, на к-рое принятые сигналы поступают после аналогово-цифрового преобразователя. Устройство отображения выполняется обычно на приёмных электронно-лучевых трубках и даёт наглядную координатную и дополнит. информацию о наблюдаемых объектах, контролируемых зонах пространства и имеющихся помехах (напр., гидрометеорах). Направление на объект Р. в РЛС с механически управляемой антенной определяют по угловому её положению, при к-ром величина принимаемого сигнала достигает максимума; в РЛС с электронно управляемым лучом вместо угл. положения антенны измеряют угл. положение луча относительно нормали к раскрыву антенны.
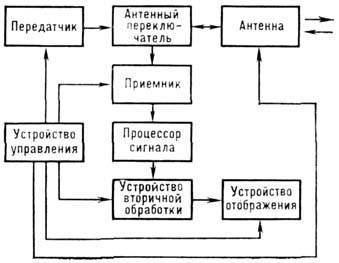
Рис. 1.
Макс. дальность R макс обнаружения может быть выражена через энергию зондирующего сигнала Et, для к-рого приёмник представляет собой согласованный фильтр:
где Е ш- энергия шума в приёмной системе, ;r - отношение сигнала к шуму, обеспечивающее обнаружение с заданной вероятностью при заданном уровне ложных тревог, h < 1 - коэфф. потерь полезной энергии. Вероятность обнаружения D и вероятность ложных тревог F л. т. - связанные параметры. Простейший вид эта связь имеет для обнаружения по одному импульсу сигнала с рэлеевским распределением амплитуды:
Требуемая энергия зондирования может быть сосредоточена в одном импульсе или в группе из n когерентных импульсов (т. е. импульсных "вырезок" из единого синусоидального колебания; при этом напряжение сигнала на выходе возрастает в n раз в сравнении с одним импульсом). Возможно также увеличить энергию сигнала за счёт некогерентного интегрирования импульсов на видеочастоте; в этом случае не потребуется поддержания определённых фазовых соотношений между импульсами на высокой и промежуточной частотах, но напряжение на интеграторе будет возрастать только как
 В теории Р. доказывается, что существует. оптимальный приём, при к-ром достигается наибольшее возможное при данной энергетике превышение сигнала над шумом на выходе "согласованного фильтра" ( фильтра электрического, импульсная характеристика к-рого является "зеркальным отражением" на оси времени). Когерентный приём позволяет приблизить энергетику РЛС к теоретич. пределу.
В теории Р. доказывается, что существует. оптимальный приём, при к-ром достигается наибольшее возможное при данной энергетике превышение сигнала над шумом на выходе "согласованного фильтра" ( фильтра электрического, импульсная характеристика к-рого является "зеркальным отражением" на оси времени). Когерентный приём позволяет приблизить энергетику РЛС к теоретич. пределу.При когерентном приёме может существенно проявляться отличие несущей частоты отражённого подвижным объектом сигнала от частоты облучающего сигнала. Эта разность, называемая доплеровским сдвигом частоты,
 где up- радиальная скорость объекта, l - длина волны (см. Доплера эффект). При длительности пачки t к когерентно накопляемых импульсов полоса частот пачки и полоса доплеровского фильтра равны Df к = 1/t к. При f д > Df к возможно выделять сигналы подвижных объектов на фоне неподвижных предметов или земной поверхности, находящейся на той же дальности. РЛС, использующие данный эффект, наз. импульсно-доплеровскими. В Р. применяется и др. способ выделения сигналов подвижных объектов на фоне мешающих отражений - селекция движущихся целей, основанная на черсс-периодном вычитании последовательно принимаемых сигналов на промежуточной частоте.
где up- радиальная скорость объекта, l - длина волны (см. Доплера эффект). При длительности пачки t к когерентно накопляемых импульсов полоса частот пачки и полоса доплеровского фильтра равны Df к = 1/t к. При f д > Df к возможно выделять сигналы подвижных объектов на фоне неподвижных предметов или земной поверхности, находящейся на той же дальности. РЛС, использующие данный эффект, наз. импульсно-доплеровскими. В Р. применяется и др. способ выделения сигналов подвижных объектов на фоне мешающих отражений - селекция движущихся целей, основанная на черсс-периодном вычитании последовательно принимаемых сигналов на промежуточной частоте.По характеру функционирования радиолокаторы разделяются на 2 осн. класса: РЛС обзора и РЛС сопровождения. РЛС обзора периодически зондируют все угл. направления сектора ответственности, обнаруживают движущиеся объекты и прокладывают трассы их движения в проекции на земную поверхность (двухкоординатные РЛС) или в пространстве (трёхкоординатные РЛС). Период осмотра пространственного сектора пропорционален ср. мощности зондирующих сигналов РЛС. РЛС сопровождения в течение всего рабочего цикла измеряет координаты движущихся относительно РЛС объектов. Многофункциональные РЛС совмещают обзор и сопровождение. В полной мере многофункциональность реализуется в РЛС с фазируемой антенной решёткой (ФАР), обеспечивающей практически безынерционное перемещение антенного луча в угл. секторе, достигающем для плоской ФАР 120° (рис. 2; по горизонтали - время, по вертикали-угл. положение антенного луча по азимуту; вытянутые по оси времени прямоугольники отображают процесс обзора; горизонтальный размер малых прямоугольников - время обслуживания одного угл. направления, на протяжении к-рого обзор пространства прерывается). На каждом азимуте луч шириной q задерживается на время te зондирования сектора ответственности по углу места (на рис. не показан), после чего цикл повторяется на смежном азимуте. Наряду с обзором ведётся сопровождение объектов на азимутах b1 и b2.
Основные параметры РЛС. Разрешающая способность и точность определения координат являются кор-релиров. характеристиками РЛС. Разрешающая способность по угл. координате приближённо равна ширине q антенного луча, а среднеквадратичное значение случайной шумовой ошибки сопровождения
где r - отношение сигнала к шуму по мощности, h - число эффективно интегрируемых выборок для системы сопровождения. Помимо шумовой ошибки имеются др. случайные ошибки, так что как бы велик ни был сигнал, угл. ошибка не стремится к нулю. Из наиб. распространённых способов измерения угл. координат ("на проходе", путём конич. сканирования, переключением диаграммы, моноимпульсным методом - см. рис. 3) наиб. точность даёт последний метод. В сантиметровом диапазоне достигнута минимальная суммарная ошибка измерения угла порядка 0,01 q. Разрешающая способность РЛС по дальности DR =
 где Df с - ширина спектра зондирующего сигнала. Среднеквадратичное значение случайной шумовой ошибки измерения дальности при сопровождении
где Df с - ширина спектра зондирующего сигнала. Среднеквадратичное значение случайной шумовой ошибки измерения дальности при сопровождении 
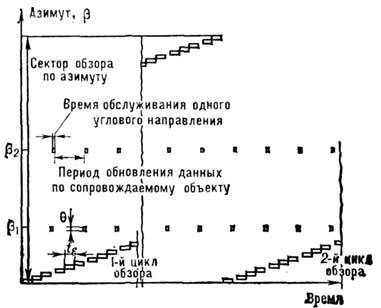
Рис. 2.
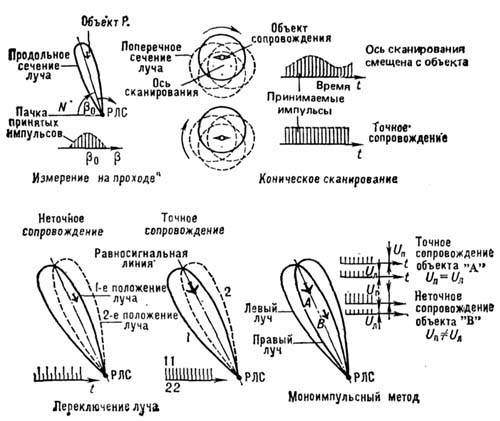
Рис .3.

Рис. 4
Для увеличения дальности действия РЛС необходимо повышать энергию зондирования, что достигается либо увеличением мощности в импульсе, либо увеличением его длительности. Второй путь предпочтительнее, т. к. устраняет ряд инженерных проблем, связанных с более высокими электрич. напряжениями. Но для сохранения при более длит. импульсах заданного разрешения по дальности требуется внутриимпульсная частотная модуляция (ЧМ) или фазо-кодовая модуляция (ФКМ), обеспечивающая ширину спектра Df с зондирующих сигналов, равную с/2DR, где с- скорость света. От длительности зондирующего импульса разрешение не зависит, но при обоих видах модуляции от неё зависит уровень мешающих боковых лепестков и ширина области их существования.
В случае внутриимпульсной линейной ЧМ принимаемый отражённый сигнал после преобразования на промежуточную частоту (см. Преобразование частоты )поступает на частотно-дисперсионную линию задержки (рис. 4, а), на выходе к-рой появляется сжатый импульс длительности 1/Df с. При внутриимпульсной ФКМ принимаемый отражённый сигнал после преобразования на промежуточную частоту поступает на линию задержки с отводами (рис. 4, б), отображающими кодовую последовательность ФКМ зондирующего импульса и снабжённую такими фазосдвигающими элементами в отводах, к-рые обеспечивают синфазное суммирование всех парциальных сигналов при достижении импульсом конца линии задержки; при этом на сумматоре появляется сжатый импульс длительностью 1/Df с.
Применение линий задержки, сумматоров, частотных фильтров, временных селекторов в виде аналоговых устройств сопряжено с рядом неудобств, обусловленных их нестабильностью, необходимостью регулировки, сложностью и высокой стоимостью. Поэтому в совр. РЛС широко применяется цифровая обработка принимаемых сигналов. Для цифровой обработки принятый сигнал после преобразования частоты и усиления подаётся на аналогово-цифровой преобразователь (АЦП), на выходе к-рого получаются выборки сигнала в виде двоичного цифрового кода, несущие в себе информацию как об амплитуде, так и о фазе принятого сигнала. Далее все операции производятся с помощью цифровых фильтров, интеграторов и устройств для селекции движущихся целей. Широкое применение в цифровых процессорах сигнала находит быстрое Фурье преобразование, резко снижающее требования к объёму вычислений и позволяющее осуществить многоканальную фильтрацию в частотной области. Важнейшее значение имеют характеристики АЦП: его разрядность определяет ди-намич. диапазон приёмника РЛС, его быстродействие - достижимое разрешение по дальности. Совр. АЦП обеспечивают быстродействие 20 МГц при 12 разрядах.
В наземных и корабельных РЛС используются гл. обр. дециметровые и сантиметровые волны. В самолётных РЛС, где габариты антенн строго ограничены, применяются только короткие сантиметровые волны. Имеются также РЛС на волнах 8 мм и даже 3 мм. Ограничение длины волны снизу определяется резко возрастающими с уменьшением l потерями в атмосфере.
Кроме активных радиолокаторов, работающих по отражённому сигналу, существуют пассивные радиолокаторы, использующие естеств. излучение объектов (радиометры). Такие устройства могут непосредственно измерять только угл. координаты.
Лит.: Современная радиолокация, пер. с англ., М., 1969; Справочник по радиолокации, под ред. М. Сколника, пер, с англ., т. 1-4, М., 1976-79; Кук Ч., Бернфельд М., Радиолокационные сигналы, пер. с англ., М., 1971; Теоретические основы радиолокации, под ред. Я. Д. Ширмана, М., 1970; Леонов А. И., Фомичев К. И., Моноимпульсная радиолокация, 2 изд., М., 1984. Т. Р. Брахман,
Физическая энциклопедия. В 5-ти томах. — М.: Советская энциклопедия. Главный редактор А. М. Прохоров. 1988.
.